ワークテスト受付(ロボット導入Lab)
 |
ロボット導入による「投資効果向上を図るための手段方法」を、システム設計からコストダウンを図るためのステップなど多方面からサポート致します。 |
 |
ロボガイドでタクトシュミレーションを行い、予想サイクルタイムの検証を行います。 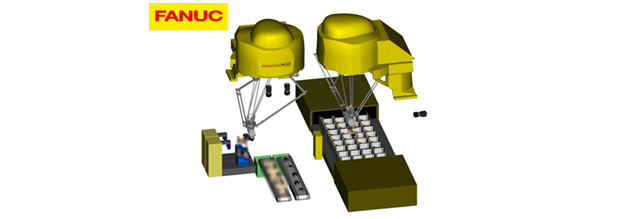
(ワークの仕様確認後、約1~2週間でご報告) → レポートを提出いたします |
 |
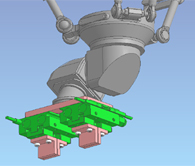
ハンド設計(エンドエフェクタ)からできる 各種ワークに対応したハンド設計(エンドエフェクタ)の設計可能
|
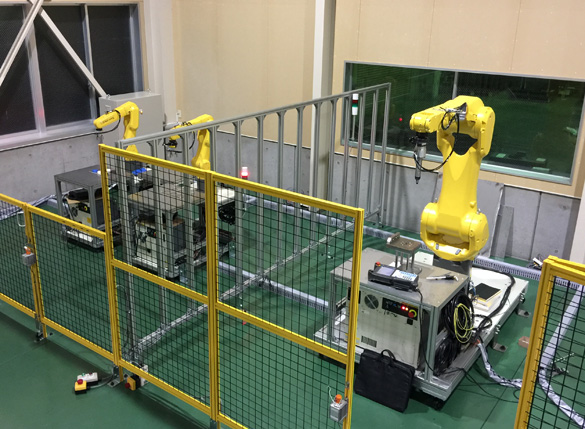
その他 ロボット設備

ファナック株式会社
LRMate200id

ファナック株式会社
M-20iB/25

ファナック株式会社
M-710iC/50

ファナック株式会社
M1iA/0.5A

ファナック株式会社
M1iA/1H

ファナック株式会社
M2iA/3SL

川崎重工業株式会社
RS005L

川崎重工業株式会社
duAro1

ファナック株式会社
LRMate200id

ファナック株式会社
M1iA/0.5AL

デンソーウェーブ株式会社
HSR-048/RC8A
|ロボティクス支援センターのサービス